
Military systems can benefit by using multicore
StoryApril 02, 2008

Steve Johnson
RadiSys
Many modern defense systems can benefit from running both real-time and non Real-Time Operating Systems (RTOSs). Marrying OS-9 with Windows or Linux on an asymmetric multiprocessing platform requires modern multicore processors such as those from Intel. Virtual machines running on the AMP manage the multiple environments.
The military is requiring more computing functionality in
compact battlefield systems to advance its tactical capability. New multicore
processors used in embedded devices provide more functionality, increase system
performance, and run at lower temperatures. The multicore operating environment
introduces a new software paradigm where general purpose and real-time
operating systems and applications need to run concurrently. This new platform
is merging traditional workstations and embedded real-time systems onto one
device. It reduces hardware costs, reduces power consumption, and increases
system reliability. From a software perspective, the multicore environment
provides an efficient platform to create hybrid applications reusing existing
software.
In this platform paradigm, Windows and Linux general
processing operating systems and a real-time operating system run on separate
cores to create a new hybrid, multiprocessing environment. This environment
has traditionally existed as separate systems connected through a network to
manage front-end real-time control and back-end data management tasks. With
multicore, the multiprocessing environment is done on-chip to support faster
and more reliable data transfer between real-time and general purpose
applications. Using the military-accepted POSIX software standard on each
processing core creates a homogenous environment that furthers portability and
reuse of developed software.
Miniaturization in a multiprocessing environment
Multicore adds functionality to battlefield systems. There is
a need to collect larger amounts of tactical data to guide action of embedded
systems, enable operator control of the device, and collect data for remote
central office back-end processing. This is combined on a single multicore
platform to support real-time and general process applications. Smaller form
factor COTS boards such as COM Express, Mini-ITX, MicroTCA, and PC/104-Plus are utilizing multicore and supporting this
functionality in a smaller hardware footprint.
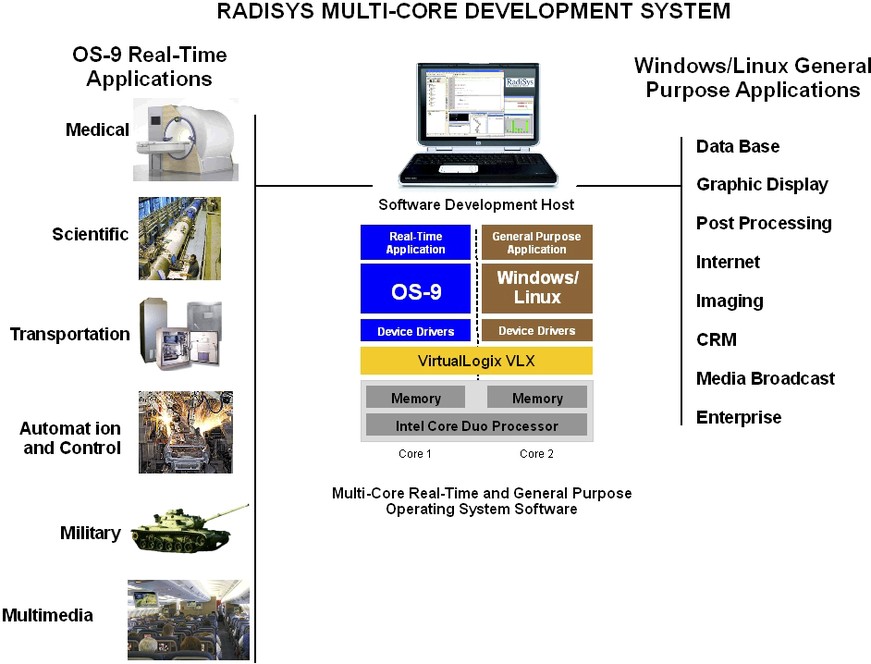
Beyond miniaturization, a hybrid multicore environment
(Figure 1) implements an Asymmetric MultiProcessing (AMP), which enables
concurrent operation of multiple operating systems. This is facilitated through
multicore hardware virtualization technology and a software machine monitor or hypervisor. Real-time and general process operating systems
communicate to each other through a virtual backplane providing data and
messaging between running processes. This is an efficient virtual environment
that users can take advantage of to speed integration of real-time and
non-real-time tasks.
Figure 1: Multicore real-time and general purpose embedded systems
(Click graphic to zoom by 2.2x)
|
|
For instance, users can take advantage of available Linux and
Windows device drivers to access non time-critical I/O through a general
purpose operating system. Users can save weeks of code development time by
using publicly available general purpose code and collecting needed data to
feed into the RTOS. Critical real-time tasks can be dedicated to the RTOS, and
background tasks can be dedicated to general purpose operating systems. The
multicore system with AMP makes this practicable for embedded systems.
An example multicore military application could have an
unmanned mobile device or robot providing live video of unexploded ordnance to
an operator with an RTOS. The mobile device can also collect additional data
for processing against databases stored on a general purpose database on
general purpose operating systems like Windows or Linux. An operator would
control an unmanned robot to disarm the suspected device. In this case, both
real-time and general purpose OSs are required to complete the task.
POSIX requirements for interoperability
The POSIX standard (POSIX 1003.1-2003) was created in 1991 to
enable applications written to the standard to be interoperable between
operating systems. The Weapons Systems Common Operating Environment (Army), the Common Integrated
Infrastructure (Air Force), and the Open
Systems Architecture (Navy) have embraced
POSIX to ensure backward and forward software compatibility.
POSIX support in a hybrid multicore environment provides a
common discipline between general purpose and real-time applications that can
be easier created and tested for either platform. What was originally created
for Linux may be better served operating under an RTOS. Having both operating systems present in a true multiprocessing
environment provides that flexibility.
Supporting an RTOS for multicore
The OS-9 real-time operating system has been configured to
work with Windows or Linux on Intel Core Duo processors. The configuration
utilizes the VirtualLogix VLX machine monitor providing virtualization between
the operating systems. OS-9 and Windows/Linux execute independently, share
memory, share I/O, and communicate through the virtual environment (refer back
to Figure 1). Requests for system and network resources are centrally managed
by the VLX virtual machine that runs directly on the multicore hardware.
Arrow Electronics has created a multicore hybrid system and
development environment utilizing the OS-9 real-time operating system,
VirtualLogix VLX machine monitor, and Fedora Linux. New hybrid real-time and
general purpose applications can be created and debugged in an integrated C
development environment.
Steve Johnson is a
software product marketing manager for RadiSys, concentrating on the OS-9
real-time operating system for single and multicore processors. He has more
than 20 years of experience working in embedded computing hardware and
real-time software. Steve holds a Bachelors of Electrical Engineering degree
from the University of Minnesota and contributes to various industry
publications. He can be contact at steve.johnson@radisys.com.
RadiSys
503-615-1100
www.radisys.com





